图像变换
3.1 图像变换的预备知识
图像变换的基本概念(目的、要求、基本方法)
1. 图像变换的目的
- 有利于图像特征提取
- 有助于从概念上(物理上)增强上对图像信息的理解
2. 图像变换的要求
- 图像变换通常是一种__二维正交变换__,一般要求:
正交变换必须是__可逆__的
- 因为通常我们需要将在变换域对图像进行处理后,再将其变换到空间域进行表达显示
正变换和反变换的算法不能太复杂;
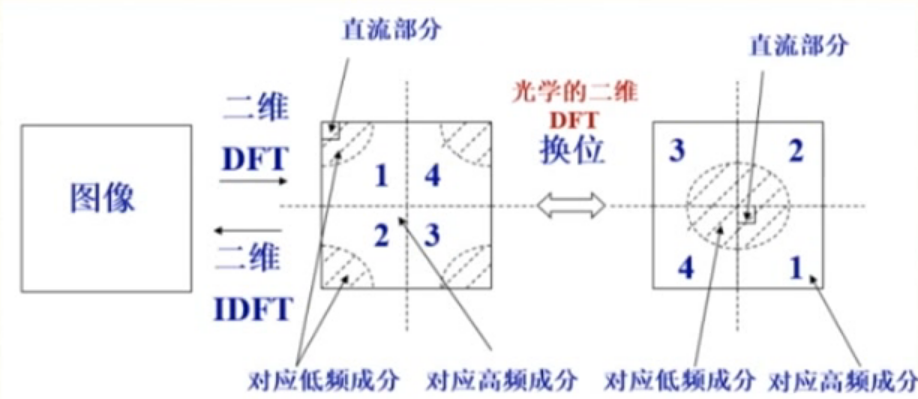
正交变换的特点(能量保持,重新分配,能量集中)
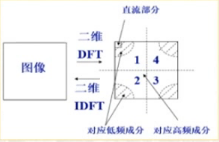
- 在变换域中图像能量将__集中分布在低频率成分上__,
- 边缘、线状信息反应在高频率成分上
- 这将有利于图像处理
3. 图像变换的基本方法
- 时域信号变换到频域,处理,后再回到时域。

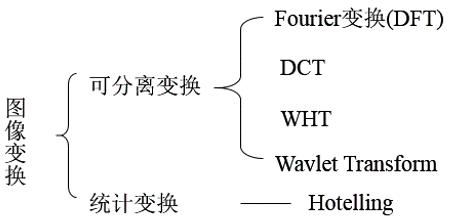
二维离散傅里叶变换DFT
3.2 傅里叶变换及其性质
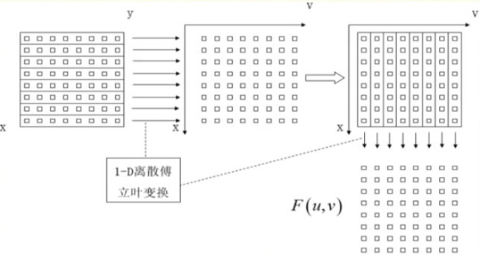
可分离性
二维离散傅立叶变换DFT可分离性的基本思想是二维DFT可以分离为两次(轮)一维DFT;
一个M∗N的二维图像f(x,y)
- 先按行对列变量y做一次长度为N的一维离散傅立叶变换
- 再将结果按列向量对x做一次长度为M的傅立叶变换就可以得到图像的傅立叶变换
F(u,v)=MN1x=0∑M−1[y=0∑N−1f(x,y)eN−j2πvy]eM−j2πuxF(x,v)=N1y=0∑N−1f(x,y)eN−j2πvy,v=0,1,...,N−1F(u,v)=M1x=0∑M−1F(x,v)eM−j2πux,u=0,1,...,M−1
同理,2d逆变换也可以类似进行.
周期性和共轭对称性
平移性质
若f(x)⇔F(u),则有f(x)eNj2πxu0⇔F(u−u0)
若f(x,y)⇔F(u,v),则由f(x,y)ej2π(xMu0+yNv0)⇔F(u−u0,v−v0)
在数字图像处理中,需要频谱中心化(将F(u,v)的原点移动到M∗N频域的中点),所以一般需要乘以一个因子,即令上式的u0=2M,v0=2N.
- 当空间域f(x,y)产生移动时,在频域只发生相位移动,并不影响幅度值.
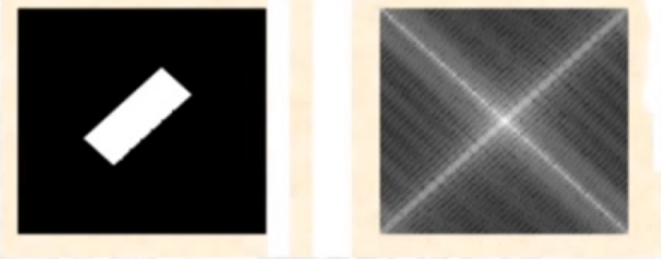
旋转性质
- 若f(x,y)旋转了一个角度,那么f(x,y)旋转后的图像的傅立叶变换也会旋转相同的角度.
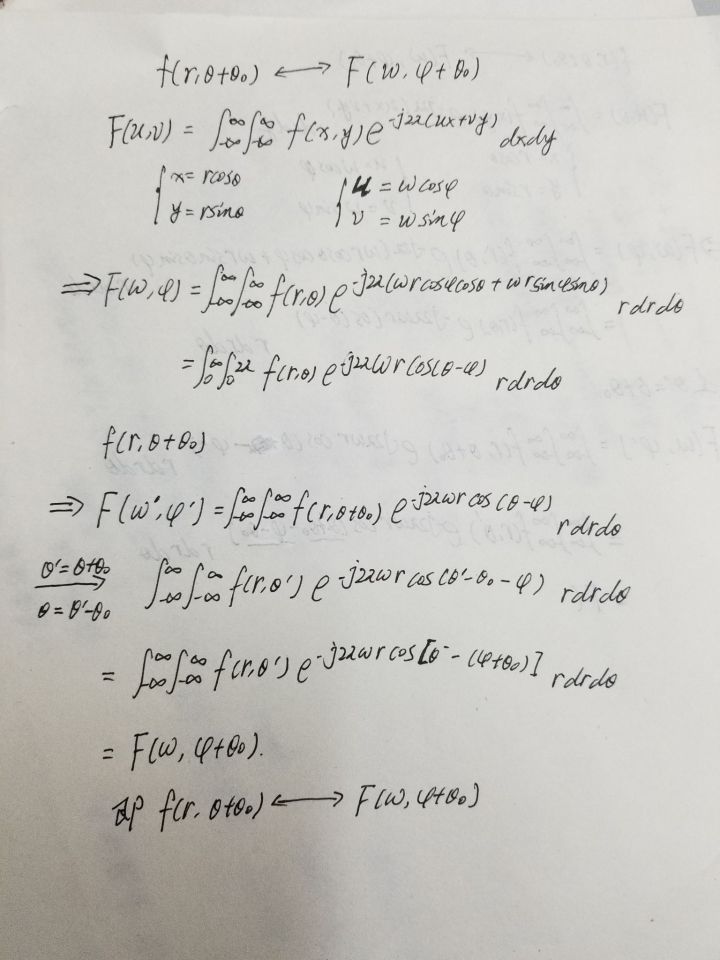
- 在极坐标系中
{x=rcosθy=rsinθ{u=ωcosϕv=ωsinϕf(x,y)→f(r,θ)⇔F(ω,ϕ)
若f(x,y)被选择θ0,则F(u,v)也会被旋转同一角度,即有
f(r,θ+θ0)⇔F(ω,ϕ+θ0) | 原图像及其傅里叶变换 | 原图像旋转45° 及其傅里叶变换 |
|---|
 |  |
证明过程1
f(x,y)旋转θ0后得到g(x′,y′),利用旋转公式可以得到
(x′y′)=(cosθ0−sinθ0sinθ0cosθ0)(xy) 则:
(xy)=(cosθ0sinθ0−sinθ0cosθ0)(x′y′) - 则g(x′,y′)的连续二维傅里叶变换为:
x=cosθ0x′−sinθ0y′y=sinθ0x′+cosθ0y′ 所以
=∫−∞+∞∫−∞+∞g(x′,y′)e−j2π(ux+vy)dxdy∫−∞+∞∫−∞+∞g(x′,y′)e−j2π(u(cosθ0x′−sinθ0y′)+v(sinθ0x′+cosθ0y′))d(cosθ0x′−sinθ0y′)d(sinθ0x′+cosθ0y′) 又因为(忽略高阶无穷小)
=≈d(cosθ0x′−sinθ0y′)d(sinθ0x′+cosθ0y′)(cosθ0dx′−sinθ0dy′)(sinθ0dx′+cosθ0dy′)(cosθ0+sinθ0)dx′(cosθ0−sinθ0)dy′ 且
=u(cosθ0x′−sinθ0y′)+v(sinθ0x′+cosθ0y′)x′(ucosθ0+vsinθ0)+y′(vcosθ0−usinθ0) 所以:
=∫−∞+∞∫−∞+∞g(x′,y′)e−j2π(x′(ucosθ0+vsinθ0)+y′(vcosθ0−usinθ0))(cosθ0+sinθ0)dx′(cosθ0−sinθ0)dy′G(ucosθ0+vsinθ0,−usinθ0+vcosθ0) 也即F(u,v)旋转后的图像.
卷积定理与相关定理
卷积定理
相关定理
- 空间域的f(x,y)与g(x,y)的相关操作等价于频率域的F(u,v)的共轭与G(u,v)相乘
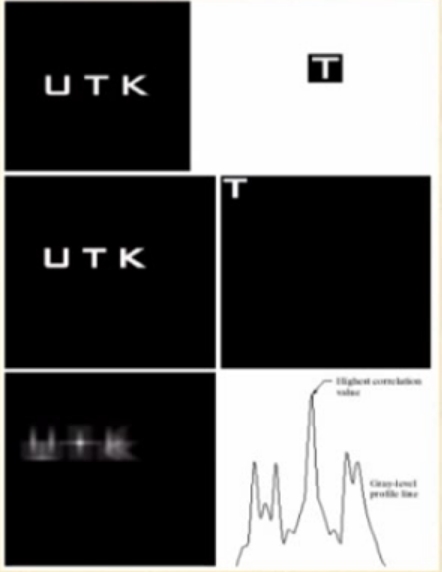
f(x,y)∘g(x,y)⇔F∗(u,v)G(u,v)f∗(x,y)∘g(x,y)⇔F(u,v)G(u,v) - 应用于匹配场合
- 相关的重要应用在于匹配,确定是否有感兴趣的物体区域。f(x,y)是原始图像,g(x,y)作为感兴趣的物体或区域(模板),如果匹配,两个函数的相关值会在f中找到相应g点的位置上达到最大值。如图所示。图像f(x,y)与模板g(x,y),通过计算相关函数,在匹配点处达到最大值,如图中红色圆圈标注的区域。
+
相关系数与相关函数(补充)
在一维情况下:
相关系数:表征两个信号f1(t)与f2(t)的相似程度;
若C12f2(t)来逼近f1(t),设f1(t)和f2(t)均为__能量有限信号__.
ϵ2=∫−∞+∞[f1(t)−C12f2(t)]2dt - 要求ϵ2的最小值,就得找到ϵ2(C12)的极点,令
dC12dϵ2C12=0=∫−∞+∞f22(t)dt∫−∞+∞f1(t)f2(t)dt ∫−∞+∞f12(t)dtϵ2==1−∫−∞+∞f12(t)dt∫−∞+∞f22(t)dt[∫−∞+∞f1(t)f2(t)dt]21−ρ122 定义相关系数ρ12
- ρ12=∫−∞+∞f12(t)dt∫−∞+∞f22(t)dt∫−∞+∞f1(t)f2(t)dt
- ρ12=∣∣f1(t)∣∣2∣∣f2(t)∣∣2⟨f1(t),f2(t)⟩
- −1≤ρ12≤1
- ρ=0 表示两信号正交.
相关系数:
ρ12=∣∣f1(t)∣∣2∣∣f2(t)∣∣2⟨f1(t),f2(t)⟩=∣∣f1(t)∣∣2∣∣f2(t)∣∣2R12(0) ρ12=∣∣f1(t)∣∣2∣∣f2(t)∣∣2⟨f1(t),f2(t)⟩=∣∣f1(t)∣∣2∣∣f2(t)∣∣2R12(τ) R12(τ)R21(τ)==∫−∞+∞f1(t)f2(t−τ)dt=∫−∞+∞f1(t+τ)f2(t)dt∫−∞+∞f1(t−τ)f2(t)dt=∫−∞+∞f1(t)f2(t+τ)dt R12(τ)=R21(τ),R12(τ)=R21(−τ) - 若f1(t)=f2(t)=f(t),则定义__自相关函数__:
R(τ)=∫−∞+∞f(t)f(t−τ)dt=∫−∞+∞f(t+τ)f(t)dt 性质:
R(τ)=R(−τ)
图书文献
MOOC《数字图像处理》——武汉大学——3. 图像变换