图像分割-区域分割
# 区域分割(基于阈值分割)
简单图像、复杂图像的区域分割
# 简单图像的区域分割
| 最简单图像f(x,y) | 灰度阈值T |
|---|---|
 |  |
# 如何确认阈值T
# 状态法(峰谷法)
- 统计图像的灰度直方图,若直方图为双峰,且有明显的谷;

- 将谷所对应的灰度值作为阈值,再按上面的公示进行二值化.
- 适合于目标与背景的灰度差别较大,且直方图有明显波谷的情况.
- 在应用中,为了便于阈值的选取,可采用灰度加权的方法产生新的直方图,得到更大的峰谷比.
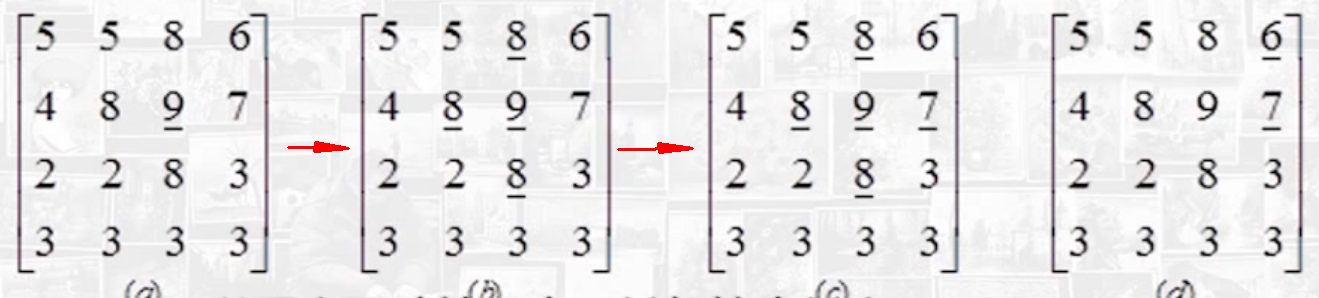
# 判断分析法
- 假定最简单图像f(i,j)的灰度区间为[0,L−1],选取一阈值 t 将图像的像素分为c1,c2两组,其中c1组像素数为w1,c2组像素数为w2;
- 图像总像素数w1+w2,灰度均值为m=w1+w2(m1w1+m2w2)
- 组内方差为:σw2=w1σ12+w2σ22
- 组间方差为:σB2=w1(m1−m)2+w2(m2−m)2=w1w2(m1−m2)2
组内方差越小,组内像素越相似,组间方差越大,则两组的差别越大.
- 故σw2σB2的值越大,表明分割效果越好.
- 改变t的取值,使得σw2σB2最大,这时所对应的t,就是分割的阈值.
判断分析法比较便利,是一种常用的方法,但它不能反映图像的集合结构,有时候的分割结果与人的视觉效果不一致。
# 最小误差分割
- 设图像中背景像素灰度级服从正态分布,概率密度为p1(z),均值和方差分别为μ1和σ12
- 感兴趣目标的像素灰度级服从正态分布,概率密度为p2(z),均值和方差分别为μ2和σ22.
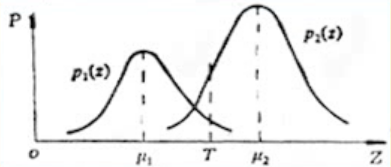
- 设背景像素数占图像总像素数的百分比为θ,目标像素数占(1−θ),则混合概率密度为:
- 当选定阈值为t时,目标像素错分为背景像素的概率为:
- 把背景像素错分为目标像素的概率为:
- 则总误差概率为:
- 为使得E(t)最小,可以令∂t∂E(t)=0,即
- 当σ12=σ22=σ2时,有t=2μ1+μ2+μ2−μ1σ2ln1−θθ
- 若先验概率已知,l例如θ=21,则有t=2μ1+μ2
# 复杂图像的区域分割
目的:多阈值分割

这幅图中,就有3个类(分别对应0,1,2),因此,我们就需要确定两个阈值 T1 和 T2 。
# 复杂图像的分割步骤
# 自动平滑直方图
一般来说,待分析图像的灰度直方图不是很平滑,这对自动寻找峰与下一步确定阈值带来困难,因此有必要对直方图进行平滑,一般来说,可以采用__空间滤波器__与直方图做卷积来进行平滑.
# 确定区域类数
对于灰度层次不多的图像,一个区域类通常对应直方图中的一个峰,但是平滑后的直方图中的每一个峰不一定都对应一个区域类,因而有必要通过检查认定峰对应的区域类.
# 自动搜索多个阈值
可以采用前面介绍过的判断分析法,依次计算各峰两两之间的最佳阈值,然后再用这组阈值分割原始图像.
# 特征空间聚类
利用特征空间聚类进行图像分割,可以看成是阈值分割概念的推广.
- 将图像空间中的像素用对应的特征空间点表示
- 根据他们在特征空间的聚集情况对特征空间进行图像分割
- 最后将他们映射会原图像空间, 得到分割的结果.
K均值聚类算法步骤
- 任意选择K个初始类均值,Z1,Z2,...,ZK
- 使用最小距离判别法将任一样本分给K类中的某一类,若对所有的i=j,有∣x−Zi∣<∣x−Zj∣,则x属于第i类.
- 根据分类结果,计算各类均值,并以此作为新的类均值.
- 比较新旧类均值,若他们之差小于某一阈值,则认为中心已经稳定,可以终止算法,输出结果,否则继续使用最小判别法进行分类.
# 区域增长(区域扩张法)
区域分割(基于阈值)的方法并没有顾及到像素之间的连接性。
区域增长(区域扩张法)顾及到像素之间的连接性。
基本原理:
- 先把图像分割成若干个小区域,
- 然后比较相邻小区域特征是否相似,若他们足够相似,则作为同一个区域合并,以此将特征相似的小区域不短合并,直到不能合并为止,最后形成特征不同的区域.
区域增长根据所用的邻域方式和相似性准则的不同,产生各种不同的区域扩张法.
| 单一型 | 质心型 | 混合型 |
|---|---|---|
| 像素与像素 | 像素与区域 | 区域与区域 |
# 简单区域生长
以像素灰度为特征的简单区域增长法
- 对图像进行光栅扫描,求出不属于任何区域的像素,当寻找不到这样的像素时结束操作.
- 把这个像素灰度同其4-邻域或8-邻域中不属于其他区域的像素进行比较,若灰度差值小于阈值,则合并到同一区域,并对合并的像素赋予标记.
- 从新合并的像素开始,反复进行上一步的操作.
- 反复进行上两步的操作,直到不能再合并
- 返回到第一步,寻找新区域出发点的像素.
- 若两个区域之间的灰度变化比较平缓,则两个区域容易被合并成一个区域,为了规避这个问题,在第二步中,改为比较已存在区域的平均灰度与该前一天有邻接的像素灰度值.
# 质心型区域生长
就是简单区域生长的改进
质心型链接操作步骤类似简单区域扩张法,唯一不同的是在上述(2)的操作中,改为比较已存在区域的像素灰度平均值与该区域邻接的像素灰度值。若差值小于阈值,则合并。
- 缺点:区域增长的结果与起始像素有关,起始位置不同,在分割结果有差异.
# 混合型区域增长
把图像分割成小区域,比较相邻的小区域的相似性,相似则合并,知道不能合并位置.
不依赖于起始点的方法
- 设灰度差的阈值为0,用简单区域扩张法把具有相同灰度的像素合并到同一区域,得到图像的初始分割图像.
- 从分割图像的一个小区域开始,求出相邻区域间的灰度差,将差值最小的区域合并.
- 反复进行第二步,把区域依次合并,适当阶段停止合并,得到分割图像.
假设检验法(根据图像子块内的灰度分布的相似性进行子块合并,最终实现图像的分割)
- 把图像分割成不交迭、大小为n×n的子块.
- 比较相邻子块的灰度直方图相似性,相似则合并为同一区域
- 反复第二步,直到区域不能合并为止.
- 相似性的判断标准:
- KS检测标准
- SD检测标准
- 相似性的判断标准:
- 难点:子块大小n的判断,根据经验n一般取5∼10
# 区域分裂合并法
使用场景:事先不清楚区域形状和区域数目.
分裂合并法对分割复杂的场景图像比较有效
# 基本原理
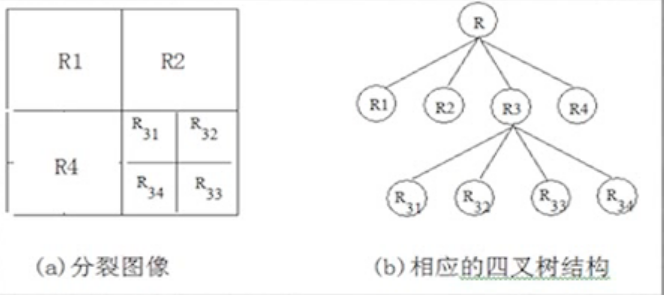
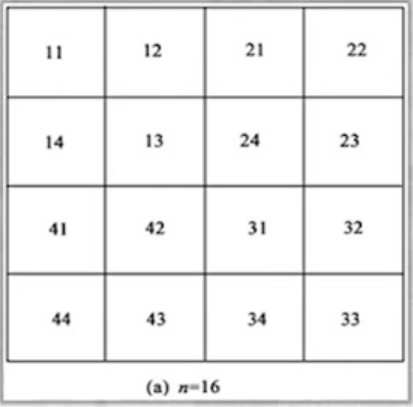
- 基于__四叉树思想__,把原始图像整体作为树根或零层,将图像等分成4块,作为被分裂的第一层.
- 对于第一层的每一个子块,如果个像素属性一致,则不再等分.
- 若属性不一致,则子块须继续分裂成相等的4块,作为第2层,如此循环.
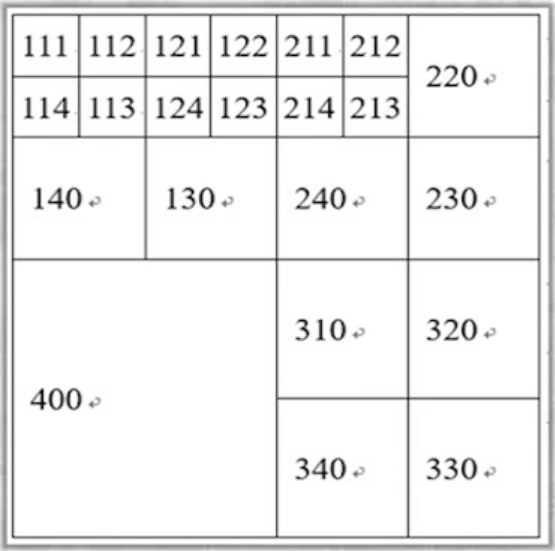
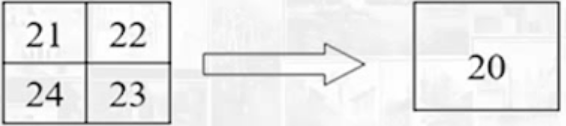
- 块的编号确定方式:
- 第一层4块,从左上块开始,按照__顺时针方向__编号1,2,3,4,第2层以后每一块的标号方式一样,但下一层子块的编号是在它的上一层的标号后添加,当不再往下划分时,其尾数添加0.
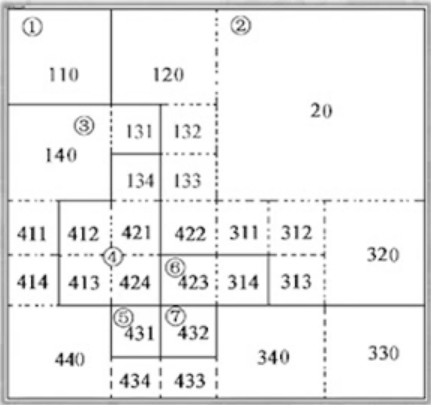
# 分裂、合并操作原则
| 合并 | 分裂 |
|---|---|
| 当同一层的4块像素满足某一特性的均匀性时,就把他们合并为一个母块 | 当某一层的某一子块内像素不满足均匀条件时,将他们分裂成4个子块 |
 |  |
- 均匀性可以看做灰度的均匀性或某种纹理特征的均匀性.
# 具体步骤
| 1初始分割 | 2合并处理 | 3分裂处理 |
|---|---|---|
| 把一幅图像分裂到第二层(4∗4=16) | 按预先给定的合并原则,对第二层的每4个子块进行检查 | 当第二层的每一个子块内像素不满足特性均匀性条件时,则把他们分裂成4个子块 |
 |  | |
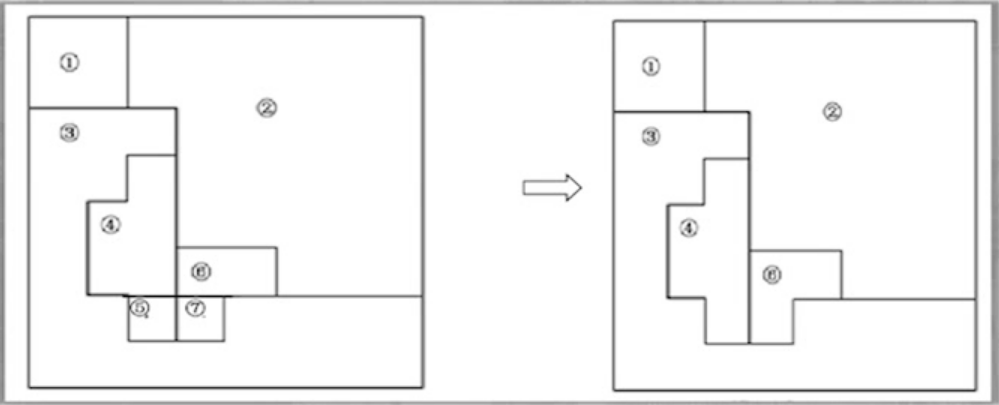
| 4组合处理 | 5消失小区 |
|---|---|
| 以每块为中心,检查与其相邻的各块,凡符合特征均匀性的,再次合并 | 将小区与邻近大块进行比较,按他们对邻近大块的均匀性程度分别划到对应区号 |
 |  |
# 图书文献
MOOC《数字图像处理》——武汉大学——7. 图像分割

